Hardware Tips
Eletronics
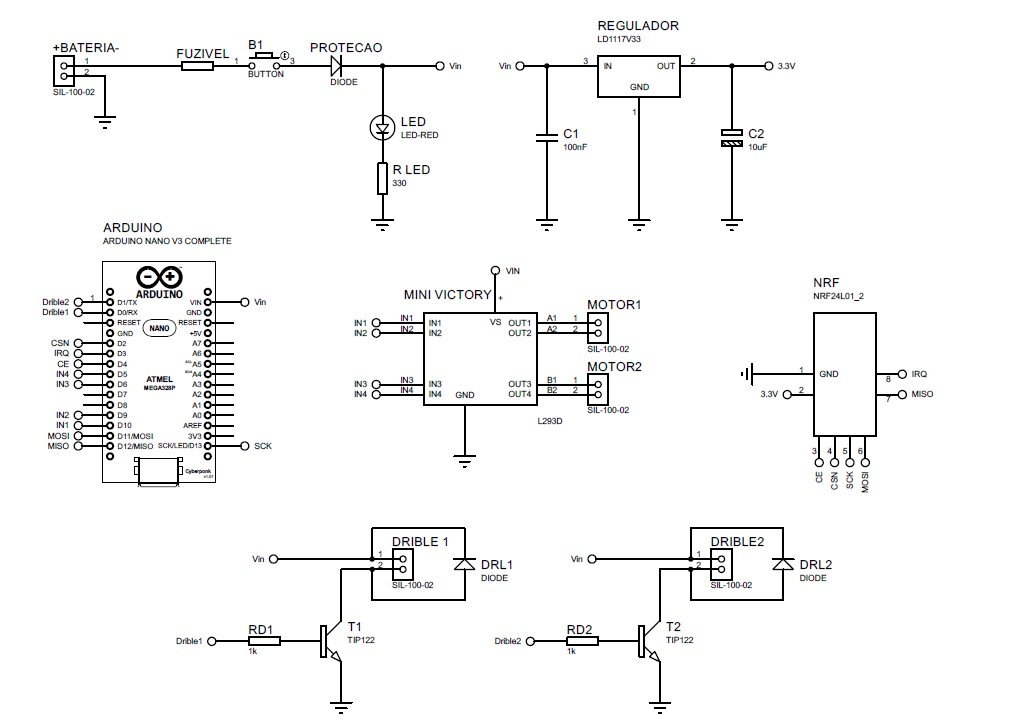
The electronic hardware used in VSSS robots is simple. The motors need to be small, due to space and may contain sensors functioning as tachometers or not. Control can be done by popular microcontrollers like Arduino or PIC. In addition, an H-Bridge will be required to control the motors, such as a Mini-Victory (see here).
In addition, for communication you can use an Xbee module or a radio like the nRF24L01 +, both have libraries for Arduino. Power supply requires a small battery and can be either a LiPo or a Ni-Cd. Attention: they can dangerous. We also recommend a simple voltage regulator circuit and add protection for batteries using diodes, as well as an on / off button. If you want to keep it very safe, you can add a small fuse.
Mechanics
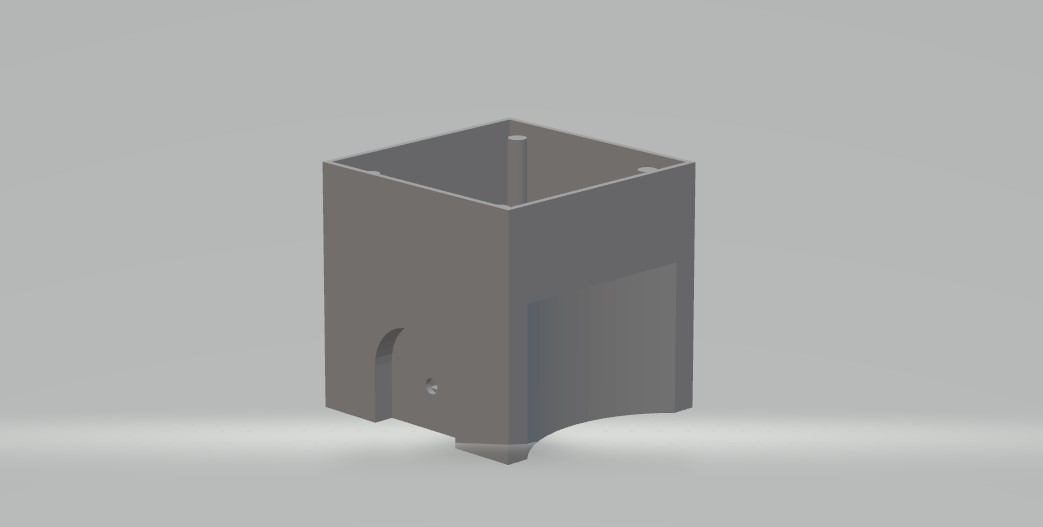
This is a easy to maintain, build and low cost robot project. Therefore, plastic materials were used, 3D pinter, wheels and motors that is easily found on the market. The structure was designed for a 3D printer, using ABS for its greater durability. Since collisions are common during the match, robustness are an important feature. The structure has two dribbles areas that also provide support for the eletronic components.
The wheel used is the 32x7mm Pololu, being a sufficient size to fit battery and other electronic components at the robot. The wheel has already rubber rings that provide more friction with the surface, preventing slippage. The engines are two N20 with reduction gearbox. the indicated speed for these engines is 400 rpm, so thate there is enough torque to win ball disputes. The appropriate reduction for the structure of the robot is 75:1. The average consumption is very small, staying at approximately 1 ampere, being powered by 6V.